Bayesian GPS
Contents
Bayesian GPS#
Title: Bayesian GPS
Subtitle: A Bayesian take on GPS esque maths
Date: 2019-05-23 13:20
Category: bayesian, interviews
Tags: python, bayesian, gps, interviews
Authors: Varun Nayyar
Question#
I call this the Bayesian GPS problem. In it’s a simplified form, we’re given a 2d plane and a series of distance estimates between ourselves and each tower. We know the location of each tower, but the measurements aren’t super accurate. Given a few thousand of these measurements, we want to know where we are on this 2d plane.
My Solution#
The Likelihood#
We consider the error circle in 2 dimensions (I’ve drawn one a bit below). Intuitively it is a circle centereed at some co-ordinate \(x\) with a distribution of it’s radius \(r\) for values of \(\theta\). For the sake of simplicity, we assume that \(\theta\sim Uniform(0,2\pi)\), but this is not necessary.
More formally, using polar co-ordinate notation, we can define the distribution in terms of the radius around center \(x\)
\begin{align*} \theta\sim & U(0,2\pi)\ d|r_{i}\sim & Normal(r_{i},(0.1r_{i})^{2}) \end{align*}
The choice of d’s variance is a bit contentious, but it makes this method quite adaptable. We could quite easily choose a fixed value for each measurement, but generally measurement error tends to be proportional to measurements.
Note that \(\theta\) and \(d\) are independent of each other . Since \(\theta\) is chosen to be uniform, we can actually drop consideration of this value since it’s just a constant normalisation value.
\begin{align*} f(\theta) & =1/2\pi\mbox{ for}\theta\in[0,2\pi] \end{align*}
Now, for location y and measurement point \(x_{i}\), d is given by the L2 norm, i.e. \begin{align*} d= & \sqrt{(y1-x1_{i})^{2}-(y2-x2_{i})^{2}} \end{align*} Now we for a location y and observation of \(x_{i}\),\(r_{i}\), and estimated sd \(rsd_{i}\)the probability of being at location y is given by \begin{align*} p(y|x_{i},r_{i})\propto & \phi((d-r_{i})/(rsd_{i})) \end{align*}
Where \(\phi\) is the standard normal rv.
Intuitively, we convert the \(x_{i}\) and y into a distance and then calculate the likelihood of seeing such a radius for our chosen distribution. The phi is the standard normal pdf but the above can be read \(f(d|r_{i},rsd_{i})\) where\(f\sim Norm(r_{i},rsd_{i})\). Since\(\theta\) doesn’t matter in this case, we’ve dropped it, but had we chosen a different distribution (say wrapped normal), we would have had to calculate \(\theta\) and it’s probability of being at this point.
Hence the likelihood function for dataset X can be be given as \begin{align*} ll(y|X)\propto & \sum_{\forall X}\frac{1}{|X|}p(y|x_{i},r_{i})\ \propto & \sum_{\forall X}p(y|x_{i},r_{i})\ = & \sum_{\forall X}\phi\left(\frac{d-r_{i}}{rsd_{i}}\right) \end{align*} Note that we’ve chosen to give each observation an equal weighting as depicted with the \(\frac{1}{|X|}\)term, which we can then drop since it’s not dependent on the data. This is the un-normalised likelihood function which we can calculate for each y. The above equation is very similar to a mixture model equation. Due to the exponential and square root, this would not provide a closed form solution for the MLE. However it is differentiable and thus the problem can be converted into a simple optimisation problem to find the MLE.
The Posterior#
However, the above is effectively a mixture model with each parameter known. These can be somewhat pathological likelihood’s with many multiple peaks that provide a lot of dependency on the initialisation conditions. Imagine an erroneous measurement far away from the true peak, and our hill climb could end up spinning around that location. It’s not a robust approach. Instead, we realise that we can calculate a posterior and with a flat prior the MLE and the Maximum a Posteriori (MAP) value coincide. For 2000 observations and 2 dimensions, this is not likely to be a problem, but would be for larger dims and smaller datasets, this would be more of a problem.
Additionally, I finished the MAP code before I realised I could solve the above equation for the MLE. I could also use auto-differentiation packages to solve this problem, but I think brute force is underrated as a technique. I think in a 2d problem, brute force is a reasonable solution when everything else is a magnitude mroe difficult. Typically, we would run an MCMC and find the maximum posteriori by finding the most commonly occurring value, but I don’t think the overhead is worth it.
Having looking at the data, I choose priors \((x,y)\in X\) are independent and \(p(x)\sim U(80,140)\), \(p(y)\sim U(130,190)\). Again, we use this value because it simplifies the maths significantly. (Also gives me another thing I can potentially publish!)
The Code#
import numpy as np
import pandas as pd
from scipy.stats import norm
import seaborn as sns
from matplotlib import pyplot as plt
from matplotlib import patches as mpatches
%matplotlib inline
def get_data():
""" read and augment the rsd"""
data = pd.read_csv("../resources/data-1.csv", names=["x", "y", "r"], skiprows=1)
data["rsd"] = 0.1 * data.r
return data
def circle_prior(dat):
"""
Produces a bunch of circles for each
observation in the data and plots.
Useful to build prior of the location to search in.
"""
from matplotlib import pyplot as plt
from matplotlib import patches as mpatches
fig = plt.figure(figsize = (12,10))
ax = fig.gca()
for i, row in dat.iterrows():
cr = mpatches.Circle([row.x, row.y], row.r, fill=False, alpha=0.1)
ax.add_patch(cr)
ax.set_ylim((dat.y.min(),dat.y.max()))
ax.set_xlim((dat.x.min(), dat.x.max()))
plt.show()
def plot_posterior(posterior):
"""
Produce a heatmap of posterior.
xticks and yticks are assumed to be
standard prior
"""
from matplotlib import pyplot as plt
plt.figure(figsize=(14,12))
plt.title("Posterior")
plt.xlabel("X")
plt.ylabel("Y")
ax = sns.heatmap(posterior, xticklabels = list(range(80, 140)), yticklabels=list(range(130,190)))
ax.invert_yaxis()
plt.show()
def ll(y, dat):
"""
The un-normalised likelihood from the model described.
For 2d input y and given 2d location x and distance r.
ll = sum phi( (r - d) / rsd)
where d = sqrt( (y1-x1)^2 + (y2-x2)^2)
See readme for more information on the derivation.
Args:
y (tuple): location in (x,y) whose likelihood we wish to calculate
dat (pd.DataFrame): x, y, r, rsd
Dataset containing the x,y, and r data as well as the
augmented sd value.
Returns:
float: likelihood at y for given dataset
"""
# calculate distance from y as a radius
d = np.sqrt((y[0] - dat.x) ** 2 + (y[1] - dat.y) ** 2)
zs = (dat.r - d) / dat.rsd
return np.sum(norm.pdf(zs))
def main(data):
# set the variance of r to be 10% of the measurement
# this can be changed as required
# from an inspection of the circle diagrams,
# we're quite sure our location is in between
# x=(80,140), y=(130,190).
# This is equivalent to a uniform prior on these regions.
# We could use MCMC on the likelihood function, however, given
# that we need to look at integer values only and our prior is 60x60=3600
# we can achieve this with just a grid search.
# In the general case, this can be done for min and max of x and y
# change as required
xpriorRange = (80, 140)
ypriorRange = (130, 190)
# convenience
st = (xpriorRange[0], ypriorRange[0])
# pre-allocate posterior
posterior = np.zeros((60, 60))
# for loops are slow and should be avoided
# however for this grid, this is small enough to not be a concern.
for x in range(*xpriorRange):
for y in range(*ypriorRange):
posterior[x - st[0]][y - st[1]] = ll((x, y), data)
# find the maximum a posteriori
maxap = np.argmax(posterior)
ind = np.unravel_index(maxap, posterior.shape)
# remember the shape needs to be updated since we start at st
location = (ind[0] + st[0], ind[1] + st[1])
return posterior, location
# let's draw the circle's. Let's keep this to 100 circles
# Hopefully this shows you why the prior has been chosen
gps_data = get_data()
circle_prior(gps_data.head(100))
---------------------------------------------------------------------------
FileNotFoundError Traceback (most recent call last)
Cell In [2], line 3
1 # let's draw the circle's. Let's keep this to 100 circles
2 # Hopefully this shows you why the prior has been chosen
----> 3 gps_data = get_data()
4 circle_prior(gps_data.head(100))
Cell In [1], line 12, in get_data()
10 def get_data():
11 """ read and augment the rsd"""
---> 12 data = pd.read_csv("../resources/data-1.csv", names=["x", "y", "r"], skiprows=1)
13 data["rsd"] = 0.1 * data.r
14 return data
File /opt/hostedtoolcache/Python/3.10.6/x64/lib/python3.10/site-packages/pandas/util/_decorators.py:311, in deprecate_nonkeyword_arguments.<locals>.decorate.<locals>.wrapper(*args, **kwargs)
305 if len(args) > num_allow_args:
306 warnings.warn(
307 msg.format(arguments=arguments),
308 FutureWarning,
309 stacklevel=stacklevel,
310 )
--> 311 return func(*args, **kwargs)
File /opt/hostedtoolcache/Python/3.10.6/x64/lib/python3.10/site-packages/pandas/io/parsers/readers.py:678, in read_csv(filepath_or_buffer, sep, delimiter, header, names, index_col, usecols, squeeze, prefix, mangle_dupe_cols, dtype, engine, converters, true_values, false_values, skipinitialspace, skiprows, skipfooter, nrows, na_values, keep_default_na, na_filter, verbose, skip_blank_lines, parse_dates, infer_datetime_format, keep_date_col, date_parser, dayfirst, cache_dates, iterator, chunksize, compression, thousands, decimal, lineterminator, quotechar, quoting, doublequote, escapechar, comment, encoding, encoding_errors, dialect, error_bad_lines, warn_bad_lines, on_bad_lines, delim_whitespace, low_memory, memory_map, float_precision, storage_options)
663 kwds_defaults = _refine_defaults_read(
664 dialect,
665 delimiter,
(...)
674 defaults={"delimiter": ","},
675 )
676 kwds.update(kwds_defaults)
--> 678 return _read(filepath_or_buffer, kwds)
File /opt/hostedtoolcache/Python/3.10.6/x64/lib/python3.10/site-packages/pandas/io/parsers/readers.py:575, in _read(filepath_or_buffer, kwds)
572 _validate_names(kwds.get("names", None))
574 # Create the parser.
--> 575 parser = TextFileReader(filepath_or_buffer, **kwds)
577 if chunksize or iterator:
578 return parser
File /opt/hostedtoolcache/Python/3.10.6/x64/lib/python3.10/site-packages/pandas/io/parsers/readers.py:932, in TextFileReader.__init__(self, f, engine, **kwds)
929 self.options["has_index_names"] = kwds["has_index_names"]
931 self.handles: IOHandles | None = None
--> 932 self._engine = self._make_engine(f, self.engine)
File /opt/hostedtoolcache/Python/3.10.6/x64/lib/python3.10/site-packages/pandas/io/parsers/readers.py:1216, in TextFileReader._make_engine(self, f, engine)
1212 mode = "rb"
1213 # error: No overload variant of "get_handle" matches argument types
1214 # "Union[str, PathLike[str], ReadCsvBuffer[bytes], ReadCsvBuffer[str]]"
1215 # , "str", "bool", "Any", "Any", "Any", "Any", "Any"
-> 1216 self.handles = get_handle( # type: ignore[call-overload]
1217 f,
1218 mode,
1219 encoding=self.options.get("encoding", None),
1220 compression=self.options.get("compression", None),
1221 memory_map=self.options.get("memory_map", False),
1222 is_text=is_text,
1223 errors=self.options.get("encoding_errors", "strict"),
1224 storage_options=self.options.get("storage_options", None),
1225 )
1226 assert self.handles is not None
1227 f = self.handles.handle
File /opt/hostedtoolcache/Python/3.10.6/x64/lib/python3.10/site-packages/pandas/io/common.py:786, in get_handle(path_or_buf, mode, encoding, compression, memory_map, is_text, errors, storage_options)
781 elif isinstance(handle, str):
782 # Check whether the filename is to be opened in binary mode.
783 # Binary mode does not support 'encoding' and 'newline'.
784 if ioargs.encoding and "b" not in ioargs.mode:
785 # Encoding
--> 786 handle = open(
787 handle,
788 ioargs.mode,
789 encoding=ioargs.encoding,
790 errors=errors,
791 newline="",
792 )
793 else:
794 # Binary mode
795 handle = open(handle, ioargs.mode)
FileNotFoundError: [Errno 2] No such file or directory: '../resources/data-1.csv'
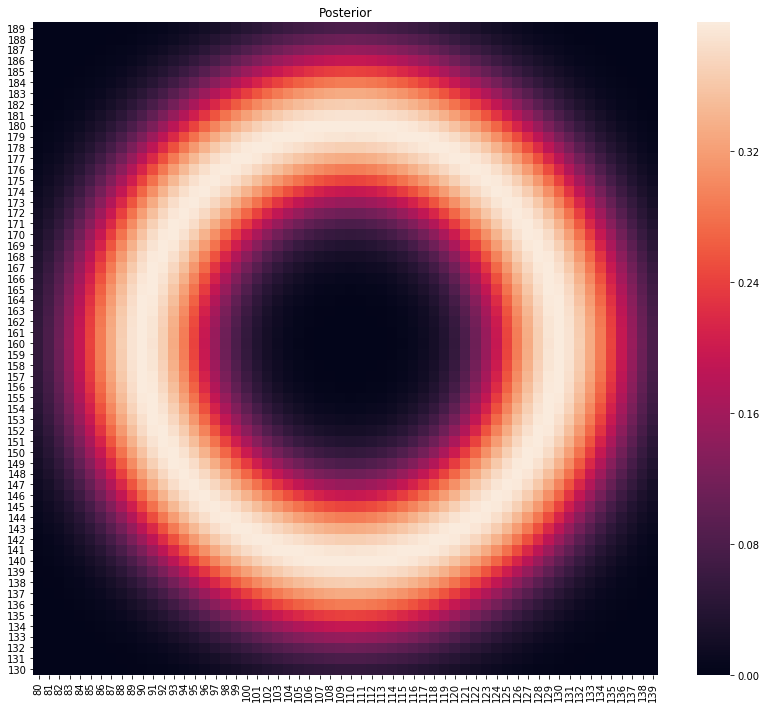
# let's see what the error circle looks like
testdat = pd.DataFrame([[110, 160, 20, 5]], columns=['x', 'y', 'r', 'rsd'])
p, lo = main(testdat)
plot_posterior(p)
# let's see what 2 intersecting error circles looks like
p, lo = main(gps_data.head(2))
plot_posterior(p)
print(f"Location at {lo}")
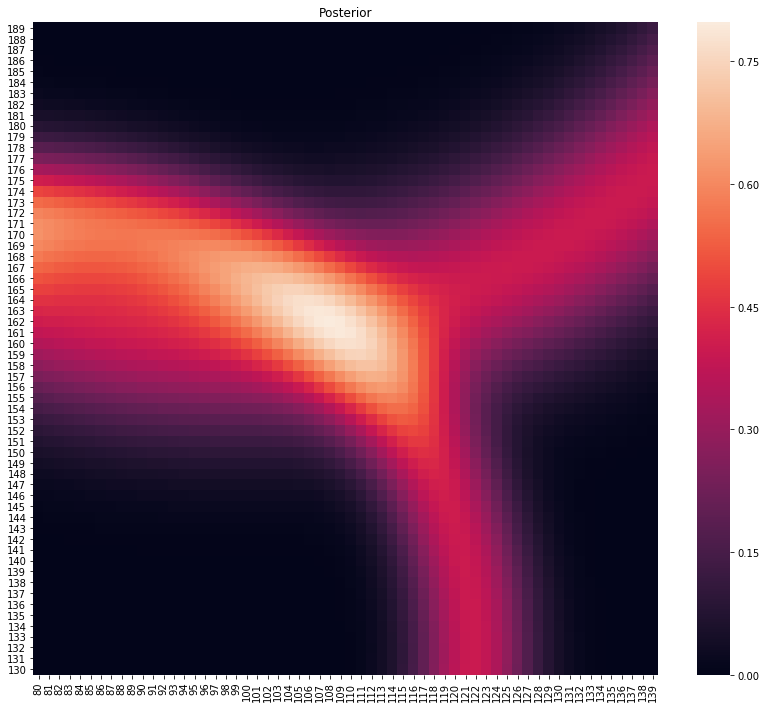
Location at (112, 158)
p, lo = main(gps_data.head(3))
plot_posterior(p)
print(f"Location at {lo}")
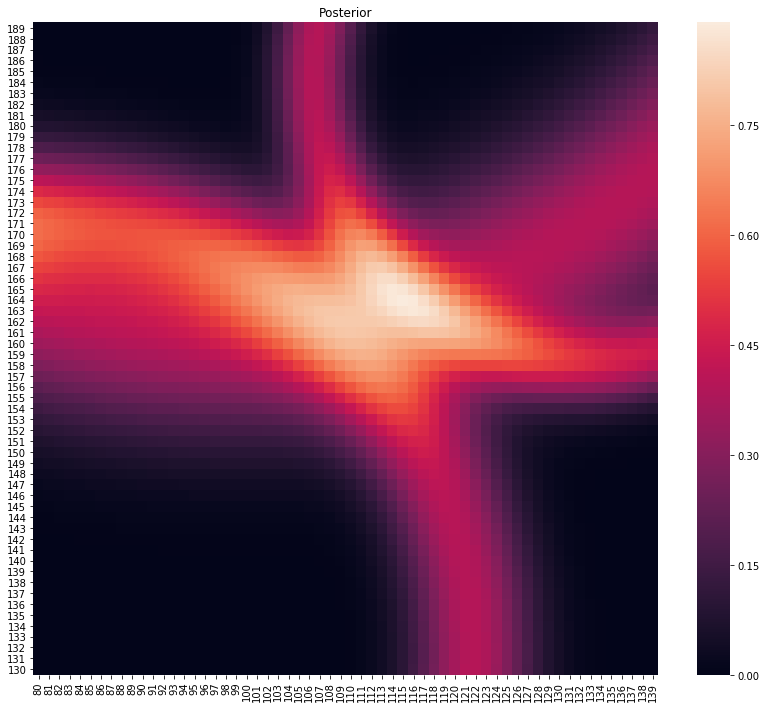
Location at (114, 165)
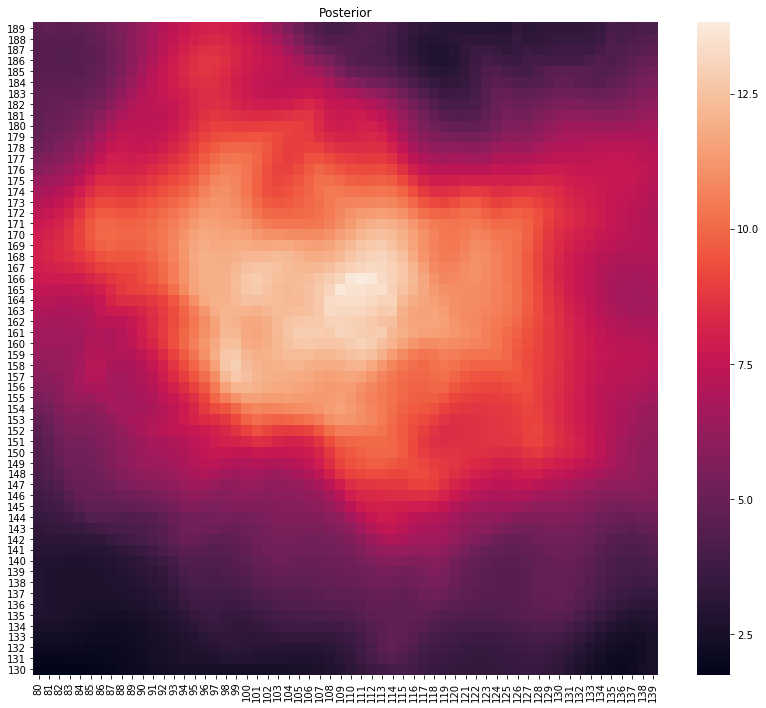
# note the outlier measurement in the top right
p, lo = main(gps_data.head(10))
plot_posterior(p)
print(f"Location at {lo}")
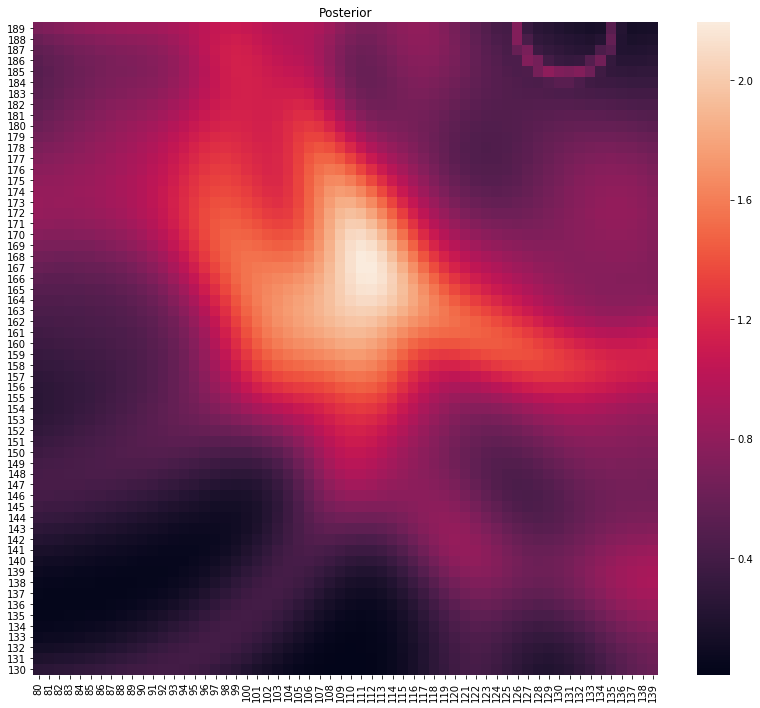
Location at (117, 162)
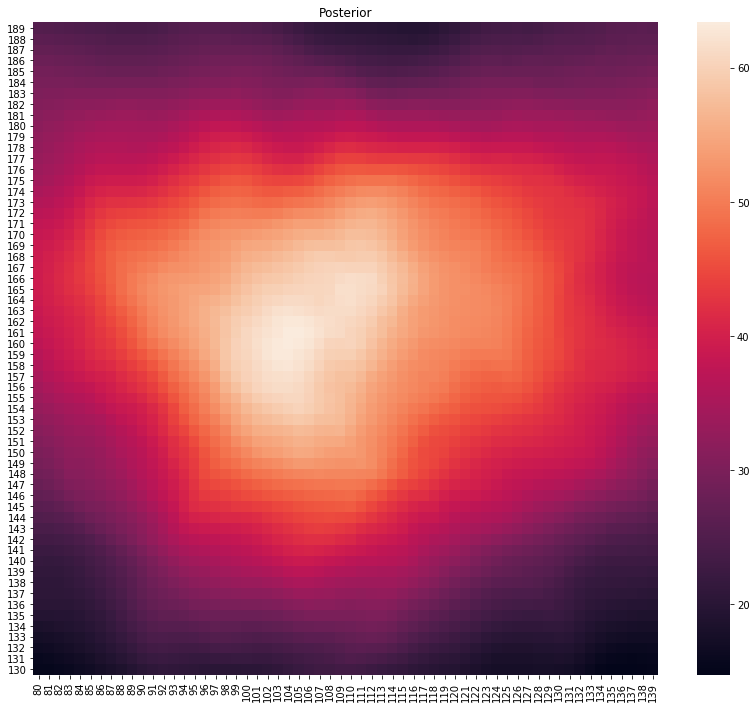
p, lo = main(gps_data.head(100))
plot_posterior(p)
print(f"Location at {lo}")
Location at (116, 161)
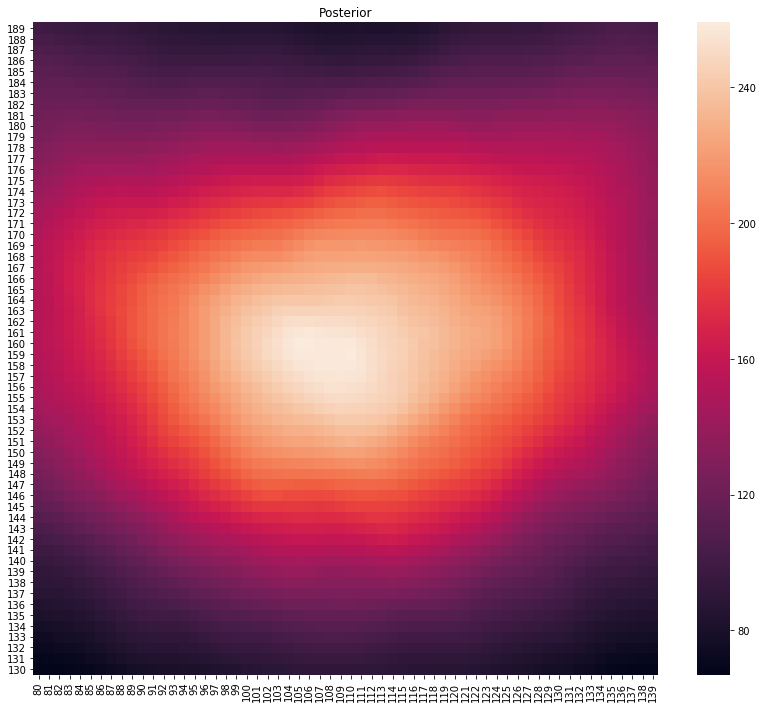
p, lo = main(gps_data.head(500))
plot_posterior(p)
print(f"Location at {lo}")
Location at (110, 154)
p, lo = main(gps_data)
plot_posterior(p)
print(f"Location at {lo}")
Location at (110, 156)
Some Conclusions#
The Good#
Bayesian Updating - the implementation allows for bayesian updating - we could calculate the posterior on disjoint sample sets and combine. This is nice since we can calculate how our posterior changes on each observation for limited increase in computation. However the simplistic implementation in Python is not optimised for this.
Posterior - while the task was to return a single best fit value, we can actually use the posterior to do proper inference or to guide our search if it isn’t at the most likely spot.
Multiple models of error on measurement possible - we have chosen a 10% sd error on the radius but could have chosen a constant value given more information on the measurement. We didn’t model the error in location of x,y for simplicity as we can consider this as part of the error in our location
Robust performance with less data - with just 10 observations we’ve al- ready worked out (117, 162) as the MAP. Would allow fewer observations to get good inference.
Ability to handle noise - in a frequentist setting, we would see observations like the 9th one could throw off frequentist inference while a Bayesian approach is more robust to outliers
Further Work#
All in all this was a simplied approach chosen to simplify the mathematics and calculations as well as respect time already spent. We could try
Optimisation on Likelihood - we could have used automatic differentiation on the likelihood or even an analytic approach (it’s not that complicated) and found the value y that maximises the Likelihood.
There are some similarities to Bayesian Filtering here (I initially considered Kalman Filters due to the inherent similarities) - perhaps we could improve the computational aspect using Bayesian Filtering theory. Fox et al suggests a few ideas worth further investigation.
Computation could be sped up by using a GPU approach on the grid search. This could be achieved by implementing the likelihood in tensorflow. Given the loops in python are the primary source of slowness, this could also be simplified with some better software engineering.
The informativeness of the priors can be improved significantly. For example, we could choose a fattish normal distribution instead of a uniform x,y. We could also set thetai to be more informative in that it was restricted to the region in the prior. This would mean measurements further away would be more informative as we didn’t have to consider all 2π radians, only the arc that fit inside our prior
A full Bayesian approach. Everything is a distribution. This is a quasi frequentist construction with a last second Bayesian-esque inference approach thrown in. I considered simulating the distributions on all of the θi,di,xi, but decided simplicity and conciseness was best. For a smaller dataset, this may make more sense since even at N=100, the posterior is still quite noisy. This would require a full MCMC approach, with a a lot of simulation (8000 from the priors) and a lot of MCMC runs to get it going.